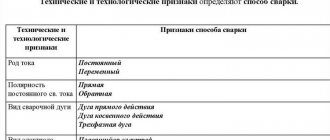
Широко распространенные сейчас в быту и на производстве электродвигатели постоянного тока имеют много достоинств, но отличаются высокими пусковыми токами. Существует несколько распространенных вариантов подключения таких электромоторов.
Благодаря отличным тяговым возможностям электрических двигателей постоянного тока собранное на их основе электрооборудование получило широкое распространение, как в быту, так и на производстве. Такие моторы часто можно встретить в современных детских игрушках, вентиляторах, электроинструментах и автономных промышленных электроустановках. Они являются неотъемлемой частью систем управления и электрификации автомобилей. В качестве источника питания обычно используются батарейки или разноемкостные аккумуляторы.
Двигатель постоянного тока также имеет много других достоинств, среди которых:
- простая регулировка частоты вращения;
- возможность мягкого пуска и плавного увеличения оборотов;
- способность разгоняться до скорости свыше трех тысяч оборотов в минуту.
Несмотря на все эти преимущества, электромотор постоянного тока имеет более сложную конструкцию, чем асинхронный силовой агрегат переменного тока на 380 или 220 вольт, что подразумевает некоторые сложности в его эксплуатации. Кроме того, здесь есть опасность возникновения пусковых токов значительной величины, поэтому существуют разные способы подключения двигателей постоянного тока, каждый из которых имеет свои особенности и нюансы. Чтобы лучше их понять, рассмотрим более детально конструкцию, принцип работы и подключение двигателя постоянного тока.
Схема подключения электродвигателя постоянного тока
Если попробовать отобразить устройство электродвигателя постоянного тока схематически, то у нас получится изображение с двумя цилиндрами, помещенными один в другой. Больший из цилиндров является полым и неподвижным и называется статор или же станина. Внутри станины помещается якорь – меньший из цилиндров, являющийся подвижным. При этом между цилиндрами внутри, в обязательном порядке, должно быть воздушное пространство и они не должны вплотную соприкасаться. Это необходимо, поскольку именно в воздушном зазоре формируется магнитное поле.
Прямой пуск электромотора
Маломощный электрический мотор (до одного киловатта) проще всего включить напрямую. Как и подключение трехфазного двигателя 380В, такой запуск электромотора постоянного тока П предусматривает подачу напряжения от источника питания непосредственно на рабочую обмотку. Поскольку отсутствует естественная компенсация за счет противодействующей электродвижущей силы, пусковой ток достигает максимального значения.
Если рассматривать прямое включение с точки зрения физики, то ситуация выглядит следующим образом. Изначально при старте мотора сила тока имеет значение, определяемое по формуле: І=U/R, где U – номинальное напряжение, R – сопротивление катушек. При этом токовая нагрузка достигает максимальной величины и может более чем в два раза превышать номинал.
Дальнейшее протекание тока инициирует возникновение электродвижущей силы противодействия, которая выступает в роли своеобразного тормоза, нормализующего стартовую нагрузку до номинальной мощности. Расчет силы тока теперь выполняется по другой формуле: І=U-Е/R, где Е – ЭДС противодействия.
В мощных силовых агрегатах, например, крановых двигателях ДК213МД2 сопротивление роторных обмоток может достигать одного Ома, что провоцирует возникновение пускового тока до 500 ампер, что в десятки раз превышает допустимое значение. Это может вызвать термическое опускание металла, оплавление и деформацию проводов, порчу контактных щеток и колец, а также создает повышенную опасность поражения электрическим током обслуживающего персонала. Поэтому для включения электромоторов средней (например, серии Д) и большой мощности рекомендуется использовать реостаты, специальные регуляторы или заведомо низкое напряжение. Прямой пуск для них противопоказан.
Устройство электродвигателя постоянного тока
Любой электродвигатель состоит из двух основных частей станины (статора) и якоря. На внутренней поверхности статора располагаются полюсы, которые изготавливаются из тонких листов электротехнической стали, изолируются друг от друга при помощи лака и заканчиваются расширениями – наконечниками. Эти наконечники предназначены для равномерного распределения магнитной индукции в воздушном зазоре. Уже непосредственно на самих полюсах располагаются несколько обмоток возбуждения. При этом некоторые из обмоток изготавливаются с большим количеством витков тонкого провода, в то время как конструкция других предполагает малое число витков толстого провода.
Якорь представляет собой зубчатый цилиндр, который устанавливается на валу внутри статора и состоит из пакетов тонких листов электротехнической стали изолированных друг от друга. Стоит отметить, что между каждым отдельным пакетом находятся специальные каналы, предназначенные для вентиляции. В то же время отдельные пазы якоря соединяются между собой проводниками, выполненными из меди. Также необходимым условием при изготовлении якоря является наличие двухслойной обмотки.
Включение через пусковой реостат
Такая схема подключения предусматривает наличие в пусковой цепи электромотора дополнительного устройства, создающего переменное сопротивление. Есть несколько способов, как подключить его и какое именно устройство использовать. Но цель здесь одна – обеспечить снижение токовой нагрузки на старте до достижения валом оптимальной скорости вращения. В процессе стабилизации силы тока сопротивление реостата должно меняться от максимума до минимума. Расчет производится по формуле: І=U/R+R(реостата).
Многим наверняка известны еще со школьных занятий по физике подобные опыты, когда сопротивление менялось вручную путем перемещения ползунка реостата. Однако на производстве такой способ малоэффективен и плохо согласовывается с токовыми величинами, поэтому применяется редко. Чаще используется вариант подключения с регулировкой по току или по электродвижущей силе в обмотках возбуждения. Также распространен монтаж к реле времени, где независимое управление отдельными ступенями осуществляется посредством временной выдержки.
Отличительной особенностью силовых агрегатов переменного тока (в отличие от рассчитанных на переменку 3ф или напряжение тока 220 вольт) – это наличие обмоток возбуждения. Перечисленные выше способы подключения применимы для электромоторов всех типов возбуждения:
- независимого;
- параллельного;
- последовательного;
- смешанного.
Но здесь есть некоторые нюансы. Моторы независимого возбуждения нельзя запускать на холостом ходу или при малых нагрузках, иначе агрегат будет поврежден от резко возросшей скорости вращения. При параллельном подсоединении через обмотку возбуждения проходит намного меньший ток, чем через роторную часть, поэтому мотор имеет жесткие характеристики, полезные для станков или вентиляторов. Если соединить ротор и обмотку возбуждения последовательно, то по ним будет протекать ток одинаковой величины. Такой силовой агрегат, распространенный в современном электротранспорте, имеет хорошие пусковые свойства, но тоже боится запуска на холостом ходу.
Принцип действия электродвигателя постоянного тока
В основе принципа работы любого современного электродвигателя постоянного тока лежит принцип магнитной индукции, а также «Правило левой руки». В том случае, если по верхней части обмотки якоря пропустить ток в одном направлении, а по нижней в другом, то он начнет вращаться. Это обусловлено тем, что по правилу левой руки, проводники, которые уложены непосредственно в пазах якоря, будут выталкиваться из магнитного поля, которое создается станиной.
Таким образом, верхняя часть будет выталкиваться влево, а нижняя – вправо, что приведет к вращению самого якоря, поскольку вся энергия от проводников будет передаваться и ему. Однако, в тот момент, когда проводники провернутся и части якоря поменяются местами расположения, его вращение остановится. Чтобы этого не случилось, в электродвигателе применяется коллектор, предназначенный для коммутирования обмотки якоря.
Подключение через микросхему Arduino
Двигатели малой мощности также можно запускать с помощью специальных функциональных платформ. Таким распространенным сейчас способом является подключения моторчика постоянного тока к Ардуино. Напрямую через Arduino подключение лучше не делать, поскольку велика вероятность повредить микросхему. Рекомендуется использовать Н-мост или транзисторы. Такая технология внедрения электромоторов в функциональные контуры предоставляет много возможностей для управления и приведения в движение рабочих частей электромашин, современных транспортных средств и роботизированных механизмов. Можно контролировать не только скорость оборотов моторчика, но и направление его движения.
Прямое подсоединение к выходным портам платформы может не только вызвать их перегорание, но также сведет функциональные возможности управления электромотором к минимуму. Через каждый такой порт может подаваться ток величиной около двадцати миллиампер, а для нормальной работы даже самого компактного электрического моторчика требуется во много раз больше. Поэтому мотор нужно подключить к Ардуино последовательно через регулятор силы подаваемого тока.
Выбирая подходящий двигатель для подключения к микроконтроллеру, следует обратить внимание на следующие характеристики:
- потребляемый ток, необходимый для нормального функционирования оборудования;
- напряжение номинальное (наиболее распространенное для таких систем – 12 вольт);
- вращательный момент – чем он больше, тем мощнее агрегат;
- скорость оборотов вала электромотора;
- вес и габариты – предпочтение сейчас отдается миниатюрным моделям.
Легче всего осуществляется последовательное подключение к Ардуино стандартного щеточного электромотора постоянного тока, рассчитанного на силу тока до 5A и рабочее напряжение около 9B. Для этого часто используют транзисторную систему. Но она позволяет только контролировать скорость оборотов. Подключение к микроконтроллеру через H-мост дает возможность также регулировать и направление вращения.
Классификация
Все трехфазные электродвигатели можно разбить на две группы:
Синхронные. Вращаются со скоростью постоянного магнитного поля. Для повышения мощности, ротор изготовляется по принципу трансформатора – имеет обмотки и сердечник. Напряжение подается через угольные щетки на кольца коллектора (контакты), закрепленного на валу, а уж потом – на катушки ротора.
Асинхронные, с короткозамкнутым ротором. Вращательный импульс идет от возбуждения катушек статора. Короткозамкнутые витки выполнены в виде беличьего колеса. Ротор вращается со скоростью ниже, чем электромагнитное поле статора. Отсюда и его название.
Применение магнитного контактора
Для организации плавного пуска приходится внедрять в цепь питания специальное коммутирующее устройство – пускатель. Это один из вариантов коннектора, который можно дополнить опциональными элементами, например, тепловым реле. Огромным преимуществом такой схемы является возможность организации не только пуска эл. двигателя, но и его остановки, реверса, а также защиты соединений от повреждения избыточными токами. Кроме того, сердечник или катушка может иметь номинал по напряжению 380 или 220В, что позволяет включать мотор в силовую и бытовую сеть.
Классические электросхемы подключения моторов через пускатель можно разделить на два типа:
- Нереверсивная. Соединение агрегата и сети без необходимости/возможности организации его обратного хода. В этом случае есть возможность интеграции, как в силовую, так и бытовую (220В) сеть,
Нереверсивная схема подключения
- Реверсивная. Электросхема, которая объединяет два пускателя (блок) с прерывателем цепи. Менять направление вращения роторного узла можно также для силовых и бытовых (220В) сетей.
Реверсивная схема подключения
Как можно судить по иллюстрациям, отличия между «сетевыми» вариантами заключаются в точках подключения выводов контактора:
- для 380 вольт контакты замыкаются на 2 из 3 фаз,
- для 220 вольт один из контактов соединяется с крайней фазой, а второй – с нулем.
Тепловое реле
Кроме того, во всех четырех вариантах присутствует элемент, обозначенный, как «Р». Это не что иное, как тепловое реле. Оно подключается в цепь последовательно с катушкой контактора и служит для обеспечения защиты двигателя от превышения токовых нагрузок.
По принципу действия тепловое реле является ключом, то есть при достижении критических для работоспособности агрегата и контактора токовых значений, происходит временный разрыв цепи питания. Некоторые виды теплового реле или «теплушки» используют для цепей постоянного тока или специфических режимах (затянутый пуск, выпадение фазы и т. п).
Постоянное включение магнитного пускателя приводит к механическому износу контактов, чего лишена тиристорная или бесконтактная схема. Разрыв цепи происходит не механическим путем (разведение контактной группы), а электронным – за счет диодных мостов.
Плюсы – минусы
Технические характеристики асихронных электродвигателей с короткозамкнутым ротором настолько превосходят показатели синхронных, что большинство приводов сделаны на их основе.
Плюсы таких устройств таковы:
- Надежность, простота конструкции, долговечность;
- Отсутствие сложностей в ремонте и обслуживании;
- Переключением 2-х фаз можно заставить вал вращаться в противоположную сторону;
- Применение в качестве генератора.
Недостатки или минусы также имеются:
- При неправильной фазировке, вал может вращаться в ненужную сторону и заклинить прочую механику (шестерни);
- Пусковой ток, превышающий номинальный до пяти раз;
- Скорость разгонки и торможения. На некоторые устройства с большой инерцией нужны движки большей мощности.
- При обрыве фазы, двигатель может сгореть если своевременно не отключить подачу напряжения.
Пуск путем изменения питающего напряжения
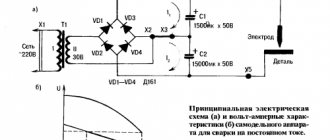
Одним из вариантов снижения токовой нагрузки при запуске электродвигателя является уменьшение питающего номинала посредством генератора постоянного напряжения или управляемого выпрямителя.
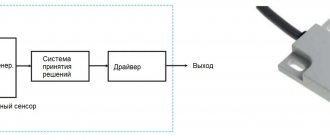
С физической точки зрения установка реостата обеспечивает тот же эффект, но с увеличением мощности электродвигателя возрастает и постоянная токовая нагрузка, существенно повышаются потери на реостатах. Поэтому снижение постоянного напряжения выполняет отдельное устройство на базе микросхемы, пример которого приведен на рисунке ниже:
Рис. 5. Схема пуска с изменением питающего напряжения
Как правильно подобрать конденсаторы
Его диаграмма включения собирается таким образом, чтобы в первом положении все контакты были разомкнуты, во втором замыкались два: питание и пусковые конденсаторы, а в третьем — только питание. Вся разница состоит в том, что в бифилярных однофазных двигателях пусковая обмотка работает только до разгона мотора. Соответственно, сечение провода рабочей обмотки больше, чем у пусковой.
Теперь один пучок проводов например, с цифрой 1 у нас будет началом, а другой — концом. Для этого могут использоваться активные резисторы, катушки индуктивности и конденсаторы. У них даже на бирках указаны, что можно проводить подключение и на трехфазную сеть, и на однофазную. При помощи тестера провода прозванивают, чтобы найти катушки.
Рабочая имеет самое меньшее сопротивление, среднее значение — пусковая обмотка, а наибольшее — это общий выход меряется сопротивление двух последовательно включенных обмоток.
Но как это сделать правильно? С асимметричным магнитопроводом статора Особенностью двигателей с данной конструкцией заключается в несимметричной форме сердечника, из-за чего появляются явно выраженные полюса.
Начала и концы этих обмоток выводятся в коробку БРНО блок расключения или распределения начал обмоток и в неё же, как правило, вкладывается паспорт двигателя: Если двигатель на два напряжения, то в БРНО будет шесть выводов. Для этого потребуется два вольтметра.
Разберем схемы подключения электродвигателя на для обоих случаев: Схемы подключения электродвигателя через конденсатор. Как подключить однофазный асинхронный двигатель с пусковой обмоткой к сети
Рекомендуем: Методика измерения фаза нуль
Подключение трехфазного двигателя на 380 вольт
Если подать в катушку переменный ток, получим переменное поле.
Такие двигатели выпускаются только однофазные, они часто устанавливаются в бытовой технике, так как позволяют получить большое число оборотов на старте и после разгона.
Невозможно точно знать коэффициент мощности и мощность двигателя, а следовательно и силу тока.
Преимущества инвертора в подключение не переделанных трёхфазных электромашин на вольт; получение полной мощности и момента электромашины без потерь; экономия электроэнергии; плавный запуск и регулировка оборотов. Для автоматического пуска используется вторая пусковая обмотка как в двухфазном электромоторе.
Читайте дополнительно: прокладка кабеля в грунте снип
Схема подключения коллекторного электродвигателя на 220 Вольт
Кстати, мотор стиральной машины через конденсатор производится. Витки короткозамкнутой обмотки приводят к существенным потерям энергии, что и является главным недостатком схемы, однако она относительно часто используется в климатических и нагревательных приборах с вентилятором.
Другими словами, должно быть два выключателя: один общий, другой — пусковой, который, после его отпускания, отключался бы сам. Поэтому, важно своевременно отпустить пусковую кнопку. Она подключается к основной электрической сети через ёмкость или индуктивность. Использовать конденсаторы для постоянного напряжения в сетях с переменным, крайне не рекомендуется по причине того, что конденсаторы взрываются.
И во многих случаях электрооборудование приводится в движение трехфазными двигателями. Всегда внимательно читайте, что написано на бирке! Теперь двигатель, который был соединен для , можно включать в сеть вольт.
Имеем два вектора взаимно перпендикулярных, меняющихся по синусоидальному закону со сдвигом фаз на 90 градусов. Если в процессе эксплуатации мотор перегревается, то, значит, емкость прибора больше требуемой. Допустим, мы посчитали ёмкость 40 мкФ. подключение двигателя 380 на 220 вольт
Классические варианты подключения
Большинство эл. моторов для современных электроприводах работают от переменной трехфазной линии (каждая из трех фаз подается отдельным проводником). Соответственно, клеммная коробка содержит выводы (входной и выходной) трех обмоток. Между собой и с сетью они могут соединяться по двух классическим схемам: «звезда» и «треугольник».
Схема подключения Звездой и Треугольником
Для первой характерной особенностью является замыкание концевых выводов каждой катушки в одну точку (на практике это одну нейтраль). На входные вывода между тем подается напряжение сети. Подобная схема характеризуется более мягким ходом, но к сожалению, не позволяет развить полную мощность.
Второй вариант с треугольником характеризуется последовательным соединением выводов обмоток: конец первой соединяется с началом второй и т. д. Такой вариант пуска гарантирует достижение паспортной мощности, но во время включения возможно возникновение больших по значению токов, которые могут термически повредить обмоточные выводы.
Если снять крышку клеммной коробки, то оба варианта подключения будут выглядеть следующим образом:
Электроника для всех
После предыдущего поста о мотор-редукторе мне пришло несколько вопросов по регулированию двигателя постоянного тока. Так что пора написать очередной пост 
Двигатель постоянного тока (ДПТ) это один из самых привычных и понятных электродвигателей, он изучается даже в школе, на физике. Он используется практически везде, где нужен малогабаритный моторчик, а также не спешит сдавать своих позиций и там, где мощность измеряется десятками киловатт. О нем и поговорим. ▌Конструктив и базовый принцип
Не буду тут особо распинаться, покажу картинку из википедии и укажу ряд основных узлов. Все остальное вы и так знаете и трогали своими руками.
1. Статор состоит из источника магнитного поля. Далеко не всегда это постоянный магнит, более того, постоянный магнит это скорей исключение, чем правило. Обычно все же это обмотка возбуждения. По крайней мере на всем, что больше кулака по размерам.
2. Якорь состоит из обмотки якоря и коллекторного узла.
Работает все очень и очень просто. Обмотка якоря отталкивается от магнитного поля статора силой Ампера и совершает пол оборота, стремясь вывести эту силу на ноль и таки вывела бы если бы не коллектор, который ловко всех обламывает переключает полярность катушки и сила вновь становится максимальной. И так по кругу. Т.е. коллектор служит механическим инвертором напряжения в якоре. Запомните этот момент, он нам еще пригодится
Обычно в мелких моторчиках всего два полюса обмотки возбуждения (одна пара) и трехзубцовый якорь. Три зуба это минимум для запуска из любого положения, но чем больше зубцов тем более эффективно используется обмотка, меньше токи и более плавный момент, т.к сила является проекцией на угол, а активный участок обмотки проворачивается на меньший угол
▌Происходящие в двигателе процессы
Думаю многие из вас кто баловался с движками могли заметить, что у них есть ярко выраженный пусковой ток, когда мотор на старте может рвануть стрелку амперметра, например, до ампера, а после разгона ток падает до каких-нибудь 200мА.
Почему это происходит? Это работает противоэдс. Когда двигатель стоит, то ток который через него может пройти зависит только лишь от двух параметров — напряжения питания и сопротивления якорной обмотки. Так что предельный ток который может развить движок и на который следует рассчитывать схему узнать несложно. Достаточно замерить сопротивление обмотки двигателя и поделить на это значение напряжение питания. Просто по закону Ома. Это и будет максимальный ток, пусковой.
Но по мере разгона начинается забавная вещь, обмотка якоря движется поперек магнитного поля статора и в ней наводится ЭДС, как в генераторе, но направлена она встречно той, что вращает двигатель. И в результате, ток через якорь резко снижается, тем больше, чем выше скорость.
А если движок дополнительно еще подкручивать по ходу, то противоэдс будет выше питания и движок начнет вкачивать энергию в систему, став генератором.
▌Немного формул
Не буду грузить никого выводами, их найдете сами если захотите. Чтобы было поменьше матана рекомендую найти учебник по электроприводу для средних учебных заведений и годом выпуска подревней. От 50х-60х годов самое то Там и картинки винтажные и расписано для вчерашнего выпускника сельской семилетки. Много букв и никакого грузилова, все четко и по делу.
Самая главная формула коллекторного двигателя постоянного тока:
U = Е + Iя*Rя
- U — напряжение подаваемое на якорь
- Rя — сопротивление якорной цепи. Обычно за этот символ считают только сопротивление обмотки, хотя можно снаружи навесить резистор какой и он к ней приплюсуется. Тогда пишут как (Rя+Rд)
- Iя — ток в якорной цепи. Тот самый который замеряется амперметром при попытке измерять потребление движка
- Е — это противоэдс или ЭДС генератора, в генераторном режиме. Она зависит от конструкции двигателя, оборотов и описывается вот такой вот простой формулой
Е = Се * Ф * n
- Ce — одна из конструктивных констант. Они зависят от конструкции двигателя, числа полюсов, количества витков, толщин зазоров между якорем и статором. Нам она не особо нужна, при желании ее можно вычислить экспериментально. Главное, что она константа и на форму кривых не влияет
- Ф — поток возбуждения. Т.е. сила магнитного поля статора. В мелких моторчиках, где оно задается постоянным магнитом это тоже константа. Но бывает под возбуждение выведена отдельная обмотка и тогда мы можем ее менять.
- n — обороты якоря.
Ну и зависимость момента от тока и потока:
М = См * Iя * Ф
См — конструктивная констатнта.
Вот тут стоит обратить внимание, что зависимость момента от тока совершенно прямая. Т.е. просто замеряя ток, при неизменном потоке возбуждения, мы можем совершенно точно узнать величину момента. Это может быть важно, например, чтобы не сломать привод, когда двигло может развить такое усилие, что легко поломает то, что оно там вращает. Особенно с редуктором.
Ну и из этого же следует, что момент у машины постоянного тока зависит только от способности источника снабжать его током. Так что идеальный нерушимый сверхпроводящий движок вам на раз лом в узел завяжет, пусть даже он сам с ноготок будет. Только энергию подавай.
А теперь смешаем все это в кучу и получим зависимость оборотов от момента — механическую характеристику двигателя.
Если ее построить, то будет нечто следующее:
n0 — это обороты идеального холостого хода сферического двигателя в вакууме. Т.е. когда наш движок ну ваще халявит, момент равен нулю. Ток потребления тоже, естественно, ноль. Т.к. противоэдс равна напряжению. Чисто теоретический вариант. А вторая точка строится уже с каким-либо моментом на валу. Получается прямая зависимость оборотов от момента. А наклон характеристики определяется сопротивлением якорной цепи. Если никаких добавочных резисторов там нет, то это зовут естественной характеристикой.
Обороты идеального холостого хода зависят от напряжения и потока. Больше ни от чего. А если поток константа (постоянный магнит), то только от напряжения. Снижая напряжение вся наша характеристика параллельно смещается вниз. Уменьшили напряжение в два раза — скорость упала в два раза.
Если есть возможность менять поток возбуждения, то можно поднимать скорость выше номинальной. Тут зависимость обратная. Ослабляем поток — двигатель разгоняется, но либо падает момент, либо ему надо жрать больше тока.
Иной двигатель со снятием возбуждения может и в разнос пойти. Помнится сдавал я затянувшийся курсач по электроприводу, уже хрен знает спустя сколько времени после сессии. Вломы мне его делать было, ага Ну и сидел в лаборатории, ждал препода. А там какие то балбесы, на курс ниже, лабу делали. Крутили движок вхолостую, а возбуждение к стенду приверчено было на соплях и слетело с клеммы. Движок в разнос пошел. У нас в лаборатории ЭПА ЮУРГУ все серьезно было, машины стояли нешуточные, по десятку киловатт и под сотню другую кг каждый. Все на суровом напряжении в 380 вольт. В общем, когда эта дура взревела как монстр и стала рваться с креплений, я только и успел крикнуть, что все нахер от машины, вырубай к черту. Не успели, двигло сорвало с креплений, обмотка повылетала с пазов и движку пришел кирдык. Ладно никого не покалечило. Впрочем, лабы привода это то еще развлечение было. У нас там и горело и взрывалось. Там я приобрел замечательные навыки чинить что угодно, чем угодно в сжатые сроки. В среднем, каждый успел по разу убить стенд наглухо, а лаба часто начиналась с починки паяльника, которым чинили осциллограф с помощью которого реанимировали убитый стенд.
Добавляя резисторы в якорную цепь мы можем увеличить наклон, т.е. чем больше грузим тем больше падает скорость.
Метод плох тем, что резисторы в цепи якоря должны быть расчитаны на ток двигателя, т.е. быть мощными и будут греться зря. Ну и момент резко падает, что плохо.
Есть еще двигатели не независимого, а последовательного возбуждения. Это когда обмотка статора включена последовательно якорю. Не каждый двигатель так можно включить, обмотка возбуждения должна выдерживать ток якоря. Но у них возникает одно интересное свойство. При пуске возникает большой пусковой ток и этот пусковой ток является же током возбуждения, обеспечивая огромный пусковой момент. Механическая характеристика напоминает гиперболу с максимумом в районе нулевых оборотов.
А дальше, по мере разгона, момент падает, а обороты наоборот растут. И если нагрузку убрать с вала, то движок сразу же уходит в разнос. Такие движки ставят на тягловый привод в основном. По крайней мере ставили раньше, до развития силовой электроники. С места эта хрень рвет так, что все стритсракеры нервно закуривают.
▌Режимы работы двигателя постоянного тока
Направление вращения движка зависит от направления тока якоря или направления потока возбуждения. Так что если взять коллекторный двигатель и подключить обмотку возбуждения параллельно якорю, то он будет прекрасно вращаться и на переменном токе (универсальные двигатели, их в кухонную технику часто ставят). Т.к. ток будет одновременно меняться и в якоре и в возбуждении. Момент правда будет пульсирующим, но это мелочи. А для реверса там надо будет поменять полярность включения якоря или возбуждения.
Если нарисовать механическую характеристику в четырех квадрантах, то у нас будет нечто похожее на это:
Вот, например, характеристика 1 на I участке у нас машина работает как двигатель. Нагрузка растет и в определенный момент двигатель останавливается и начинает вращаться в обратную сторону, т.е. нагрузка обращает его вспять. Это тормозной режим, противовключение. Режим очень тяжелый, двигло греется просто зверски, но для торможения очень эффективный. Если же момент на валу сменит направление и пойдет вращать навстречу движку, то мотор сразу же выйдет на генерацию (IV участок).
Характеристика 2 это то же самое, только с обратной полярностью питающего напряжения двигателя.
А характеристика 3 это динамическое торможение. Оно же реостатное. Т.е. когда мы берем и просто коротим наш двигатель на резистор или сам на себя. Можете сами проверить, возьмите любой моторчик и покрутите его, а потом закоротите ему якорь и покрутите снова. На валу будет ощутимое усилие, тем больше, чем качественнее движок.
Кстати, драйвера двигателей вроде L293 или L297 имеют возможность включить реостатное торможение, подачей обоих ключей вверх или вниз. При этом якорь коротится через драйвер на шину земли или питания.
▌Бесколлекторные двигатели постоянного тока
Коллекторный движок он очень хорош. Он чертовски легко и гибко регулируется. Можно повышать обороты, понижать, механическая характеристика жесткая, момент он держит на ура. Зависимость прямая. Ну сказка, а не мотор. Если бы не одна ложка говна во всей этой вкусняшке — коллектор.
Это сложный, дорогой и очень ненадежный узел. Он искрит, создает помехи, забивается проводящей пылью от щеток. А при большой нагрузке может полыхнуть, образовав круговой огонь и тогда все, капец движку. Закоротит все дугой наглухо.
Но что такое коллектор вообще? Нафига он нужен? Выше я говорил, что коллектор это механический инвертор. Его задача переключать напряжение якоря туда сюда, подставляя обмотку под поток.
А на дворе то уже 21 век и дешевые и мощные полупроводники сейчас на каждом шагу. Так зачем нам нужен механический инвертор если мы можем сделать его электронным? Правильно, незачем! Так что берем и заменяем коллектор силовыми ключами, а еще добавляем датчики положения ротора, чтобы знать в какой момент переключать обмотки.
А для пущего удобства выворачиваем двигатель наизнанку — гораздо проще вращать магнит или простенькую обмотку возбуждения, чем якорь со всей этой тряхомудией на борту. В качестве ротора тут выступает либо мощный постоянный магнит, либо обмотка питаемая с контактных колец. Что хоть и смахивает на коллектор, но не в пример надежней его.
И получаем что? Правильно! Бесщеточный двигатель постоянного тока aka BLDC. Все те же няшные и удобные характеристики ДПТ, но без этого мерзкого коллектора. И не надо путать BLDC с синхронными двигателями. Это совсем разные машины и разным принципом действия и управления, хотя конструктивно они ОЧЕНЬ схожи и тот же синхронник вполне может работать как BLDC, добавить ему только датчиков да систему управления. Но это уже совсем другая история.
Работа устройств со специфической подвижной частью
Привычным вариантом роторного узла трехфазного асинхронного электродвигателя является короткозамкнутый типа «беличья клетка», который набирается из стальных пластин. Когда существует необходимость снизить номинал пусковых токов с возможностью регулирования частоты вращения, тогда используется фазный ротор. Характерной его особенностью являются две группы выводов:
- Статорная. Классический клеммный блок, на который подводится напряжение сети (380 или 220В),
- Роторная. Дополнительный клеммник для выводов обмоток фазного ротора, к которым подключаются контакты реостата (блока сопротивлений).
Последний необходим для плавного пуска с постепенным включением/отключением отдельных сопротивлений в обмоточной цепи фазного ротора.