Для выполнения многих видов работ по обработке древесины, металла или других типов материалов требуются не высокие скорости, а хорошее тяговое усилие. Правильнее будет сказать — момент. Именно благодаря ему запланированную работу можно выполнить качественно и с минимальными потерями мощности. Для этого в качестве приводного устройства применяются моторы постоянного тока (или коллекторные), в которых выпрямление питающего напряжения осуществляется самим агрегатом. Тогда для достижения требуемых рабочих характеристик необходима регулировка оборотов коллекторного двигателя без потери мощности.
Особенности регулирования скорости
Важно знать, что каждый двигатель при вращении потребляет не только активную, но и реактивную мощность. При этом уровень реактивной мощности будет больше, что связано с характером нагрузки. В данном случае задачей конструирования устройств регулирования скорости вращения коллекторных двигателей является уменьшение разницы между активной и реактивной мощностями. Поэтому подобные преобразователи будут довольно сложными, и самостоятельно их изготовить непросто.
Своими руками можно сконструировать лишь некоторое подобие регулятора, но говорить о сохранении мощности не стоит. Что такое мощность? С точки зрения электрических показателей, это произведение потребляемого тока, умноженное на напряжение. Результат даст некое значение, которое включает активную и реактивную составляющие. Для выделения только активной, то есть сведения потерь к нулю, необходимо изменить характер нагрузки на активную. Такими характеристиками обладают только полупроводниковые резисторы.
Следовательно, необходимо индуктивность заменить на резистор, но это невозможно, потому что двигатель превратится во что-то иное и явно не станет приводить что-либо в движение. Задача регулирования без потерь заключается в том, чтобы сохранить момент, а не мощность: она все равно будет изменяться. Справиться с подобной задачей сможет только преобразователь, который будет управлять скоростью за счёт изменения длительности импульса открытия тиристоров или силовых транзисторов.
Основные задачи
Регулятор оборотов в любой электрической установке предназначается для настройки числа оборотов за определенную единицу времени. Обычно измерение скорости вращения производится в оборотах за минуту (об/мин). Когда нажата кнопка запуска, происходит подача пускового импульса; в этот момент регулятор оборотов настраивает двигатель для мягкого старта, корректируя частоту, силу и напряжение тока. Определенные технические процедуры подразумевают снижение темпа движения рабочих органов оборудования на конкретную величину.
В зависимости от условий эксплуатации регулятор оборотов, подключаемый к электродвигателю, может выполнять ряд других задач:
- управление текущим температурным состоянием и уровнем давления в системе без необходимости использования узла обратной связи с приводимыми в движение органами оборудования либо же в случае использования асинхронного двигателя;
- увеличение степени сохранения электрической энергии без потери мощности. Адаптируя двигатель для плавного пуска, регулятор снижает потери КПД при старте и остановке ротора, в процессе наращивания или снижения скорости и настройки тяги. Если выбран двигатель для работы короткими импульсами (например, воздушный компрессор), который при этом достаточно маленький, наличие регулятора оборотов является необходимостью;
- асинхронные электродвигатели, находящиеся под высокой нагрузкой на валу, используют регулятор для предотвращения подачи слишком сильного стартового импульса. Это снижает вероятность ложного срабатывания защитной автоматики благодаря уменьшению нагрузки на токопроводящие сети;
- электрический двигатель для работы в трехфазной сети требует наличия регулятора для стабилизации скорости на определенной величине. Это облегчает осуществление точных технологических операций, от тонкости настройки которых напрямую зависит качество итоговой продукции. Нарушение методики может происходить из-за скачков энергоснабжения или нагрузки на вал. С предустановленным регулятором электродвигатель 220 вольт работает более стабильно;
- если система имеет стандартную конфигурацию и электромотор питается от сети с напряжением 220В, регулятор оборотов зачастую выполняет только базовые функции – изменение скорости от нуля до допустимого предела. Также сюда относится поддержание крутящего момента при медленном ходе мотора.
Наличие тех или иных возможностей в определенной модели регулятора зависит от его конструкции. Немаловажную роль также играет принцип действия и особенности проектирования.
Обобщенная схема регулятора
Примером регулятора, который осуществляет принцип управления мотором без потерь мощности, можно рассмотреть тиристорный преобразователь. Это пропорционально-интегральные схемы с обратной связью, которые обеспечивают жесткое регулирование характеристик, начиная от разгона-торможения и заканчивая реверсом. Самым эффективным является импульсно-фазовое управление: частота следования импульсов отпирания синхронизируется с частотой сети. Это позволяет сохранять момент без роста потерь в реактивной составляющей. Обобщенную схему можно представить несколькими блоками:
- силовой управляемый выпрямитель;
- блок управления выпрямителем или схема импульсно-фазового регулирования;
- обратная связь по тахогенератору;
- блок регулирования тока в обмотках двигателя.
Перед тем как углубляться в более точное устройство и принцип регулирования, необходимо определиться с типом коллекторного двигателя. От этого будет зависеть схема управления его рабочими характеристиками.
Связанные материалы
Трехфазный асинхронный электродвигатель для преобразования однофазного напряжения в трехфазное: получаем 380 Вольт в гараже… У меня в гараже стоят несколько станков: токарные по дереву и металлу, фрезерный и циркулярка. Но…
Универсальный привод с Системой Импульсно — Фазового Управления… Регулятор служит не только для плавного регулирования оборотов двигателя постоянного тока, но в…
Однофазный привод постоянного тока… В основе разработки электропривода лежит принцип работы следящего привода с одноконтурной системой…
Регулятор нагрева паяльника в корпусе удлинителя… Одной из первых схем для начинающего радиолюбителя часто становится тиристорный регулятор мощности…
Ветрогенератор на базе асинхронного двигателя… Конструкция этого ветрогенератора, достаточно простая и надежная. Это первая попытка переделки…
Atmel U211B — контроллер оборотов двигателя от стиралки для домашнего станка… Моя новая датагорская статья посвящена теме о превращении электродвигателя от стиральной машины в…
Автоматический регулятор оборотов микродрели от Александъра Савова… Да, это моя дрель и почему-то все пугаются когда её видят. Ну, жалко мне пока денег на нормальный…
Управление шаговым двигателем с ПК… Драйвер для шагового двигателя, который управляется с персонального компьютера. Привет всем! Решил…
Двухканальный аналоговый контроллер охлаждения видеокарт, ПК или усилителя. LM35, LM358, NE555… Достались мне недорого две видеокарты ATI HD4870 с кастомным охлаждением Thermaltake DuOrb…
Регулятор мощности на полевых транзисторах с ШИ-управлением + устройство для питания 110-вольтовой аппаратуры от 220 Вольт… Привет всем датагорцам и гостям Датагории! Предлагаю схемку простого в изготовлении и наладке…
Вечный энкодер (валкодер) с устойчивыми положениями из шагового двигателя… Механический энкодер — вещь удобная в использовании, но он имеет некоторые досадные недостатки. В…
Сверлильный станок для печатных плат на базе механизмов дисковых приводов… Сейчас аппаратура быстро устаревает. Всё, что остаётся не у дел, надо снова пускать в дело!…
Разновидности коллекторных двигателей
Известно, как минимум, два типа коллекторных двигателей. К первому относятся устройства с якорем и обмоткой возбуждения на статоре. Ко второму можно отнести приспособления с якорем и постоянными магнитами. Также необходимо определиться, для каких целей требуется сконструировать регулятор:
- Если необходимо регулировать простым движением (например, вращением шлифовального камня или сверлением), то обороты потребуется изменять в пределах от какого-то минимального значения, неравному нулю, — до максимального. Примерный показатель: от 1000 до 3000 об/мин. Для этого подойдёт упрощённая схема на 1 тиристоре или на паре транзисторов.
- Если необходимо управлять скоростью от 0 до максимума, тогда придется использовать полноценные схемы преобразователей с обратной связью и жёсткими характеристиками регулирования. Обычно у мастеров-самоучек или любителей оказываются именно коллекторные двигатели с обмоткой возбуждения и тахогенератором. Таким мотором является агрегат, используемый в любой современной стиральной машине и часто выходящий из строя. Поэтому рассмотрим принцип управления именно этим двигателем, изучив его устройство более подробно.
Способы подключения
Прежде чем начать интеграцию регулятора оборотов, необходимо изучить руководство. Там указан тип и механизм работы имеющейся модели. Без этой информации можно допустить ошибку и спровоцировать поломку модуля либо двигателя. Как правило, схема подключения регулятора оборотов не особенно отличается по разновидностям последних, поэтому в руководстве пользователя будет представлен чертеж типовой электроцепи.
Изучив схему интеграции, необходимо понять, как используется метод распиновки. С его помощью определяется количество выводов для полноценного управления имеющейся разновидностью электрического мотора. Далее проводится сопоставление выходных контактов электродвигателя и цветовых обозначений разъемов регулятора. Необходимо подбирать приборы так, чтобы не оставалось неподключенных выходов. Если какой-то контакт останется неиспользуемым, их можно закоротить, чтобы не нарушилась работа мотора. Когда все обозначения совпадут, можно начинать соединение и подключение к энергоснабжению.
Конструкция мотора
Конструктивно двигатель от стиральной машины «Индезит» несложен, но при проектировании регулятора управления его скоростью необходимо учесть параметры. Моторы могут быть различными по характеристикам, из-за чего будет изменяться и управление. Также учитывается режим работы, от чего будет зависеть конструкция преобразователя. Конструктивно коллекторный мотор состоит из следующих компонентов:
- Якорь, на нем имеется обмотка, уложенная в пазы сердечника.
- Коллектор, механический выпрямитель переменного напряжения сети, посредством которого оно передается на обмотку.
- Статор с обмоткой возбуждения. Он необходим для создания постоянного магнитного поля, в котором будет вращаться якорь.
При увеличении тока в цепи двигателя, включенного по стандартной схеме, обмотка возбуждения включена последовательно с якорем. При таком включении мы увеличиваем и магнитное поле, воздействующее на якорь, что позволяет добиться линейности характеристик. Если поле будет неизменным, то получить хорошую динамику сложнее, не говоря уже о больших потерях мощности. Такие двигатели лучше использовать на низких скоростях, так как ими удобнее управлять на малых дискретных перемещениях.
Организовав раздельное управление возбуждением и якорем, можно добиться высокой точности позиционирования вала двигателя, но схема управления тогда существенно усложнится. Поэтому подробнее рассмотрим регулятор, который позволяет изменять скорость вращения от 0 до максимальной величины, но без позиционирования. Это может пригодиться, если из двигателя от стиральной машины будет изготавливаться полноценный сверлильный станок с возможностью нарезания резьбы.
Методы настройки оборотов
Для предотвращения отрицательного влияния во время пуска нужно уменьшить обороты электродвигателя 220 в или 380 в. Существует несколько способов достижения этой цели:
- Изменение значения R цепи ротора.
- Изменение U в обмотке статора.
- Изменение частоты U.
- Переключение полюсов.
При изменении значения R роторной части при помощи дополнительных резисторов приводит к снижению частоты вращения, но в результате этого уменьшается мощность. Следовательно, получается значительная потеря электроэнергии. Этот тип регулирования следует применять для фазного ротора.
При изменении значений U на статорной катушке возможно механическое или электрическое управление частотой вращения ротора. В этом случае используется регулятор U. Использование такого способа позволяет применять его только при вентиляторном характере нагрузки (например, регулятор оборотов вентилятора 220в). Для всех остальных случаев применяют трехфазные автоматические трансформаторы, позволяющие плавно изменять значения U, или тиристорные регуляторы.
Исходя из формулы зависимости частоты вращения от частоты питающего U можно производить регулирование количества оборотов ротора. Частота вращающегося магнитного поля статора вычисляется по формуле: Nст = 60 * f /p (f — частота тока питающей сети, p — число пар полюсов). Этот способ обеспечивает возможность плавного регулирования частоты вращения роторной части. Для получения высокого коэффициента полезного действия нужно изменять частоту и U. Этот способ является оптимальным для двигателей с короткозамкнутым ротором, так как потери мощности минимальны. Существует два метода изменения количества пар полюсов:
- В статор (в пазы) нужно уложить 2 обмотки с различным числом p.
- Обмотка состоит из двух частей, соединенных параллельно или последовательно.
Основным недостатком этого метода является поддержание ступенчатого характера изменения частоты электромотора с короткозамкнутым ротором.
Выбор схемы
Выяснив все условия, при которых будет использоваться мотор, можно начинать изготавливать регулятор оборотов коллекторного двигателя. Начинать стоит с выбора подходящей схемы, которая обеспечит вас всеми необходимыми характеристиками и возможностями. Следует вспомнить их:
- Регулирование скорости от 0 до максимума.
- Обеспечение хорошего крутящего момента на низких скоростях.
- Плавность регулирования оборотов.
Рассматривая множество схем в интернете, можно сделать вывод о том, что мало кто занимается созданием подобных «агрегатов». Это связано со сложностью принципа управления, так как необходимо организовать регулирование многих параметров. Угол открытия тиристоров, длительность импульса управления, время разгона-торможения, скорость нарастания момента. Данными функциями занимается схема на контроллере, выполняющая сложные интегральные вычисления и преобразования. Рассмотрим одну из схем, которая пользуется популярностью у мастеров-самоучек или тех, кто просто хочет с пользой применить старый двигатель от стиральной машины.
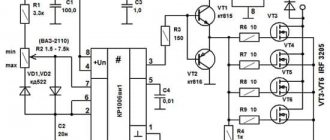
Всем нашим критериям отвечает схема управления скоростью вращения коллекторным двигателем, собранная на специализированной микросхеме TDA 1085. Это полностью готовый драйвер для управления моторами, которые позволяют регулировать скорость от 0 до максимального значения, обеспечивая поддержание момента за счёт использования тахогенератора.
Принцип работы устройства
Принцип работы и конструкция регулятора оборотов двигателя отличается простотой, поэтому, изучив технические моменты, вполне по силам выполнить их самостоятельно. Конструктивно выделяют несколько основных компонентов, из которых состоят регуляторы вращения:
- Электрический двигатель.
- Блок преобразователя и микроконтроллерная схема управления.
- Механизмы и приводы.
Отличием асинхронных двигателей от стандартных приводов является вращение ротора с максимальными показателями мощности при подаче напряжения на обмотку трансформатора. На начальном этапе показатели потребляемого тока и мощность у двигателя возрастает до максимума, что приводит к существенной нагрузке на привод и его быстрому выходу из строя.
При запуске двигателя на максимальных оборотах выделяется большое количество тепла, что приводит к перегреву привода, обмотки и других элементов привода. Благодаря использованию частотного преобразователя имеется возможность плавно разгонять двигатель, что предупреждает перегрев и другие проблемы с агрегатом. Электромотор может при использовании частотного преобразователя запускаться на частоте оборотов 1000 в минуту, а в последующем обеспечивается плавный разгон, когда каждые 10 секунд прибавляется 100−200 оборотов двигателя.
Особенности конструкции
Микросхема оснащена всем необходимым для осуществления качественного управления двигателем в различных скоростных режимах, начиная от торможения, заканчивая разгоном и вращением с максимальной скоростью. Поэтому ее использование намного упрощает конструкцию, одновременно делая весь привод универсальным, так как можно выбирать любые обороты с неизменным моментом на валу и использовать не только в качестве привода конвейерной ленты или сверлильного станка, но и для перемещения стола.
Характеристики микросхемы можно найти на официальном сайте. Мы укажем основные особенности, которые потребуются для конструирования преобразователя. К ним можно отнести: интегрированную схему преобразования частоты в напряжение, генератор разгона, устройство плавного пуска, блок обработки сигналов Тахо, модуль ограничения тока и прочее. Как видите, схема оснащена рядом защит, которые обеспечат стабильность функционирования регулятора в разных режимах.
На рисунке ниже изображена типовая схема включения микросхемы.
Схема несложная, поэтому вполне воспроизводима своими руками. Есть некоторые особенности, к которым относятся предельные значения и способ регулирования скоростью:
- Максимальный ток в обмотках двигателя не должен превышать 10 А (при условии той комплектации, которая представлена на схеме). Если применить симистор с большим прямым током, то мощность может быть выше. Учтите, что потребуется изменить сопротивление в цепи обратной связи в меньшую сторону, а также индуктивность шунта.
- Максимальная скорость вращения достигается 3200 об/мин. Эта характеристика зависит от типа двигателя. Схема может управлять моторами до 16 тыс. об/мин.
- Время разгона до максимальной скорости достигает 1 секунды.
- Нормальный разгон обеспечивается за 10 секунд от 800 до 1300 об/мин.
- На двигателе использован 8-полюсный тахогенератор с максимальным выходным напряжением на 6000 об/мин 30 В. То есть он должен выдавать 8мВ на 1 об/мин. При 15000 об/мин на нем должно быть напряжение 12 В.
- Для управления двигателем используется симистор на 15А и предельным напряжением 600 В.
Если потребуется организовать реверс двигателя, то для этого придется дополнить схему пускателем, который будет переключать направление обмотки возбуждения. Также потребуется схема контроля нулевых оборотов, чтобы давать разрешение на реверс. На рисунке не указано.
Структура частотного регулятора
В настоящее время детально разработаны и широко применяются две основные топологии многоуровневых частотных преобразователей. Это каскадные и преобразователи на базе многоуровневых частотных инверторов напряжения.
Рис. №3 Структурная схема частотного преобразователя многоуровневого типа высокого напряжения, построенная на базе IGBT-транзисторов с воздушным или водяным охлаждением.
В состав устройства включен многообмоточный трансформатор. К особенностям схемы относится наличие силовых ячеек с последовательным соединением, благодаря чему на выходе устройства получается суммарное высокое напряжение. Подобная схема служит для получения формы выходного напряжения практически приближенной к идеальному синусу. Наличие шунтируемых в момент неисправности ячеек обуславливает высокую надежность схемы.
Как продолжение предыдущей схемы рассмотрим схему преобразователя на базе трансформаторного многоуровневого инвертора напряжения с широтно-импульсной модуляцией с применением IGBT-модулей. Для устройства характерна фиксированная частота ШИМ – 3кГц. В структуру устройства включены система защиты с использованием микропроцессора.
Рис. 4 Структурная схема преобразователя.
На схеме видно, что все блоки функционально взаимосвязаны. На схеме показано как работает частотный регулятор для асинхронного двигателя, устройство и принцип работы.
В первом блоке находится входной трансформатор, в блоке осуществляется передача электроэнергии от трехфазного высоковольтного источника питания. От многоуровневого трансформатора производится распределение пониженного напряжения в шкаф инвертора на многоуровневый инвертор.
Шкаф инвертора включает в состав многоуровневый трехфазный инвертор, состоящий из ячеек – преобразователей. В каждой находится шестиимпульсный фильтр для выпрямления звена постоянного тока и мостовой инвертор напряжения на IGBT-транзисторах. По схеме происходит выпрямление входного переменного тока, который благодаря инвертору изменяется в переменный ток, обладающий регулируемыми показателями частоты и напряжения.
В шкафу защиты управления находятся микропроцессорный блок, обладающий многофункциональными возможностями и системой питания от ТСН преобразователя, устройство ввода преобразователя и первичные сенсоры, обозначающие режимы работы преобразователя.
Микропроцессор служит для формирования сигналов управления инвертором в зависимости от обозначенного алгоритма работы. Он служит для обработки сведений, собранных с датчиков напряжения и тока. Микропроцессор формирует сигналы для управления защитами и аварийными кнопками управления, корректирует алгоритм управления.
Для передачи сведений и связи используется оптоволоконный кабель. Для бесперебойной работы имеется независимый встроенный источник питания. Редактирование параметров выполняется пультом дистанционного управления.
Для надежного отключения и безопасного проведения различного рода работ преобразователь оборудован линейным разъединителем.
Рис. №5 Обобщенная схема ячейки преобразователя
Источники управляемого переменного напряжения формируют фазу напряжения для выполнения их последовательного соединения. Выходная схема питающей сети асинхронного двигателя происходит по схеме соединения обмоток «Звезда». Напряжение в трехфазном инверторе распределяется по схеме.
Рис. №6 Схема распределения напряжения в инверторе на три фазы.
Принцип управления
При задании скорости вращения вала двигателя резистором в цепи вывода 5 на выходе формируется последовательность импульсов для отпирания симистора на определенную величину угла. Интенсивность оборотов отслеживается по тахогенератору, что происходит в цифровом формате. Драйвер преобразует полученные импульсы в аналоговое напряжение, из-за чего скорость вала стабилизируется на едином значении, независимо от нагрузки. Если напряжение с тахогенератора изменится, то внутренний регулятор увеличит уровень выходного сигнала управления симистора, что приведёт к повышению скорости.
Микросхема может управлять двумя линейными ускорениями, позволяющими добиваться требуемой от двигателя динамики. Одно из них устанавливается по Ramp 6 вывод схемы. Данный регулятор используется самими производителями стиральных машин, поэтому он обладает всеми преимуществами для того, чтобы быть использованным в бытовых целях. Это обеспечивается благодаря наличию следующих блоков:
- Стабилизатор напряжения для обеспечения нормальной работы схемы управления. Он реализован по выводам 9, 10.
- Схема контроля скорости вращения. Реализована по выводам МС 4, 11, 12. При необходимости регулятор можно перевести на аналоговый датчик, тогда выводы 8 и 12 объединяются.
- Блок пусковых импульсов. Он реализован по выводам 1, 2, 13, 14, 15. Выполняет регулировку длительности импульсов управления, задержку, формирования их из постоянного напряжения и калибровку.
- Устройство генерации напряжения пилообразной формы. Выводы 5, 6 и 7. Он используется для регулирования скорости согласно заданному значению.
- Схема усилителя управления. Вывод 16. Позволяет отрегулировать разницу между заданной и фактической скоростью.
- Устройство ограничения тока по выводу 3. При повышении напряжения на нем происходит уменьшение угла отпирания симистора.
Использование подобной схемы обеспечивает полноценное управление коллекторным мотором в любых режимах. Благодаря принудительному регулированию ускорения можно добиваться необходимой скорости разгона до заданной частоты вращения. Такой регулятор можно применять для всех современных двигателей от стиралок, используемых в иных целях.
Изготовление самодельных реле
Изготовить самодельный регулятор оборотов электродвигателя 12 В не составит какого-либо труда. Для такой работы потребуется следующее:
- Проволочные резисторы.
- Переключатель на несколько положений.
- Блок управления и реле.
Использование проволочных резисторов позволяет изменять напряжение питания, соответственно, и частоту вращения двигателя. Такой регулятор обеспечивает ступенчатый разгон двигателя, отличается простой конструкции и может быть выполнен даже начинающими радиолюбителями. Такие простейшие самодельные ступенчатые регуляторы можно использовать с асинхронными и контактными двигателями.
Принцип работы самодельного преобразователя:
- Питание от сети направляется на конденсатор.
- Используемый конденсатор полностью заряжается.
- Нагрузка передается на резистор и нижний кабель.
- Электрод тиристора, соединенный с положительным контактом на конденсаторе, получает нагрузку.
- Передаётся заряд напряжения.
- Происходит открытие второго полупроводника.
- Тиристор пропускает полученную с конденсатора нагрузку.
- Конденсатор полностью разряжается, после чего повторяется полупериод.
В прошлом наибольшей популярностью пользовались механические регуляторы, выполненные на основе вариатора или шестеренчатого привода. Однако они не отличались должной надежностью и часто выходили из строя.
Самодельные электронные регуляторы зарекомендовали себя с наилучшей стороны. Они используют принцип изменения ступенчатого или плавного напряжения, отличаются долговечностью, надежностью, имеют компактные габариты и обеспечивают возможность тонкой настройки работы привода.
Дополнительное использование в схемах электронных регуляторов симисторов и аналогичных устройств позволяет обеспечить плавное изменение мощности напряжения, соответственно электродвигатель будет правильно набирать обороты, постепенно выходя на свою максимальную мощность.
Для обеспечения качественной регулировки в схему включаются переменные резисторы, которые изменяют амплитуду входящего сигнала, обеспечивая плавное или ступенчатое изменение числа оборотов.
Регулятор усилия шуруповерта
Регулятор усилия представляет собой муфту, ограничивающую усилие при вращении патрона. Она выполнена в виде вращающегося пластикового барабана. Величина ее затяжки регулируется с помощью цифровой шкалы, размещенной по окружности барабана. Увеличивая величину затяжки, тем самым вы глубже ввинчиваете саморез.
Эта функция будет необходима при работе с материалом изделий различной степени твердости, поскольку при работе с мягким материалом тело самореза будет легко утапливаться в нем, слишком высокая твердость материала будет способствовать нарушению геометрии шурупа, особенно если он небольших размеров. Трещотка, как еще называют регулятор, предотвращает срезание шлицев у саморезов, а также износ насадок шуруповерта. Затягивать регулировочное кольцо следует поэтапно начиная с самого небольшого усилия. В тех шуруповертах, в которых возможно производить сверление, последняя пиктограмма на кольце будет в виде сверла. В этой позиции достигается максимальный крутящий момент.
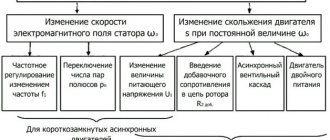
Изменение скорости АД с короткозамкнутым ротором
Существует несколько способов:
- Управление вращением за счет изменения электромагнитного поля статора: частотное регулирование и изменение числа пар полюсов.
- Изменение скольжения электромотора за счет уменьшения или увеличения напряжения (может применяться для АД с фазным ротором).
Частотное регулирование
В данном случае регулировка производится с помощью подключенного к двигателю устройства для преобразования частоты. Для этого применяются мощные тиристорные преобразователи. Процесс частотного регулирования можно рассмотреть на примере формулы ЭДС трансформатора:
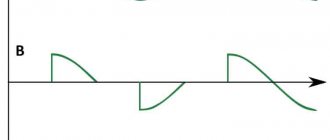
Данное выражение означает, что для сохранения постоянного магнитного потока, означающего сохранение перегрузочной способности электромотора, следует одновременно с преобразованием частоты корректировать и уровень питающего напряжения. Если сохраняется выражение, вычисленное по формуле:
то это означает, что критический момент не изменен. А механические характеристики соответствуют рисунку ниже, если вы не понимаете, что значат эти характеристики, то в этом случае регулировка происходит без потери мощности и момента.